当時、コンピュータはミニコンピューターの時代を経てマイクロコンピュータが出現していたが、初期のマイクロコンピュータはホビイストには受け入れられ、広がりを見せ始めていたが、まだまだ信頼性は乏しく業務に用いることの出来ることは出来なかった。
一万ドルコンピュータPDP8で普及したミニコンピュータが現場で監視用あるいは制御用に用いられていた頃であった。
12ビットのPDP8に続き、16ビットミニコンピュータPDP11シリーズで販売実績を伸ばしていたDEC社から、LSI化されたミニコンピュータLSI11が商品化されていた。
マイクロ・ミニコンピュータと言うべき製品であった。
リアルタイム・マルチタスク・オペレーティングシステムRSX11、RT11も信頼性の高いものであった。
このLSI11で浚渫運転支援システムを開発したのである。
浚渫ポンプの吸入負圧、吐出圧、流速、スラリ密度などプロセス入力信号や、浚渫ポンプ、カッターモーター、スイングウィンチの回転数や出力、ジャイロによるスイング角度、ラダー深度など関連機器の作動状況などを入力することにした。
当時、GPSはまだ一般に使える状況になく潮位も適切なセンサがなく、これらの扱いをどうしようかと考えたりしたことを思い出した。
オペレーティング・システムがフレキシブル・ディスク・ベースであった。
いまならば、ROMやRAMという方法もあるが、そのまま商品として売りっぱなしに出来るシステムではなかった。
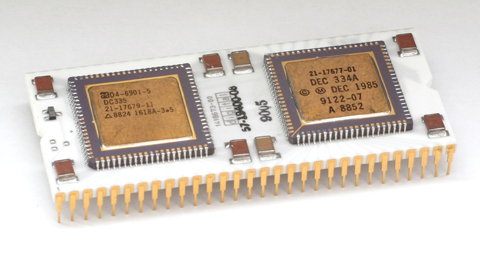
これがLSI11/23のマイクロプロセッサである。
CRTには断面および平面の浚渫位置と各機器の運転状況をリアルタイム表示する機能があったが、単なる運転監視モニターではなく、機器の負荷など運転状態から適正な運転状況であるかどうかを判断し、画面上に運転ガイダンスをテキスト表示する点がこの運転支援システムのポイントであった。