2006年09月29日
(生い立ちの記:34) 水中歩行式浚渫ロボットの開発(3)
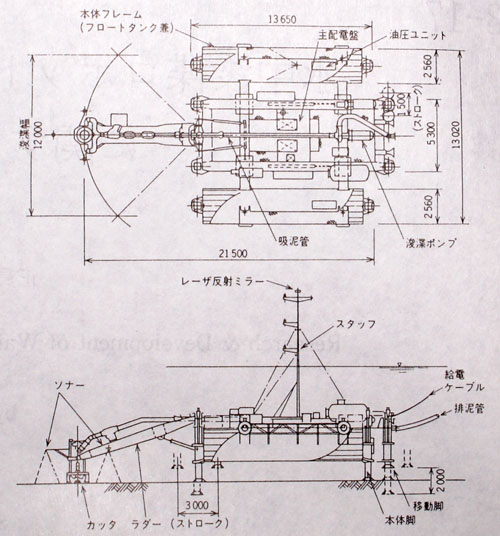
浚渫方式は通常のポンプ船と同じくラダーの昇降とスイングにより、12mの幅を浚渫するので深度、方位角、本体傾斜の要求精度が厳しかった。
浚渫計画深度は基準水面から鉛直下方に指定されるがこれを直接測定することは出来ない。
海面は干満差があり主要な港に潮汐表が発行されているが、高潮でなくても風によって潮位が変動することがあり局地的に潮位が変わることもあるので港湾工事では常にその港の潮位を参照して工事を進める。
もしそのような局地的変動がなくても常に波が立っておりセンサーで測定したデータをそのまま制御に用いるわけには行かない。
浚渫後検査で堀残しが判明すると浚渫工事のやり直しで大幅な予算・納期の超過を来す。
これをおそれて深めに浚渫すると無駄な余掘りが多くなる。
特にスイング方式で浚渫を行う場合は本体(台船)が僅かでも傾いているとラダーの先端ではその位置のズレが増幅されるので方位角もさることながら、左右・前後の傾斜角は局限せねばならない。
基本計画ではジャイロコンパスの方位精度±1度(分解能±0.1度)、本体の傾斜を検出するサーボ傾斜計はレンジを±5度(分解能0.1秒以下)のものを採用した。
この高精度制御を実現させるために油圧システムを採用し、歩行制御・スイング機構その他で計24本もの油圧シリンダが用いられた。
センサーとアクチュエーターがあっても、常時適正な状態で浚渫工事を続けるためには海底のロボットと遠隔制御室のコンピュータとの間に高速のネットワークが必要となる。
このため陸上から動力を供給する電力ケーブルに光ファイバーを組み込み、高速LANを構築することとした。
水中部分に検出したセンサーデーターを陸上に送り、遠隔制御室からの制御信号をアクチュエータに送る送受信部を組み込み、トークンバス方式で大量のデータを毎秒2回の周期で交換し制御精度を確保することにしたのである。
これらのデータの中には各機器の作動状況・自動歩行作動状態・油圧やセンサーなどの運転指標や異常を示すものも含ませた。
"(生い立ちの記:34) 水中歩行式浚渫ロボットの開発(3)"へのコメントはまだありません。